Paso de una hélice.
Las palas de una hélice son perfiles aerodinámicos, como las alas de un avión, y su diseño y fabricación, durante las primeras décadas de la aviación, era comparable al trabajo de un artesano. Hoy en día el diseño de las palas de una hélice sigue siendo una obra de ingeniería, mientras se busca sacar el máximo rendimiento a cada rotación de una hélice.
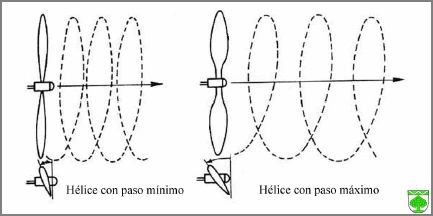
Geométricamente hablando, o gráficamente, el paso de una hélice es la distancia horizontal que avanzaría el avión por cada rotación de la hélice. De forma más visual todavía, el paso de un sacacorchos es la distancia que penetra en el corcho por cada vuelta que le damos.
Hasta mediados de los años treinta, las hélices solían estar hechas de un solo bloque, estando las palas fijas al buje. Eran hélices de paso fijo. Los ingenieros comprendieron en seguida que se podría aprovechar mucha mas energía, por vuelta de hélice, si diseñaban una hélice donde el ángulo de las palas pudiese variar. Nacieron así las hélices de paso variable.
No voy a entrar en detalles ahora, que alargarían este apéndice excesivamente; baste saber que las hélices de la mayoría de los aviones que volaremos en el IL2 Sturmovik, son hélices de velocidad constante y de paso variable. El ángulo de las palas varia automáticamente, por un sistema mixto de contrapesos y de presión hidráulica, para acercarse siempre al ángulo que proporciona el mayor rendimiento de la hélice, mientras se mantienen constantes las revoluciones por minuto de la misma.

Cuando una hélice esta en paso máximo, como la de la imagen, se dice que esta abanderada o en bandera. En esta posición, las palas casi no ofrecen resistencia al avance. Por este motivo esta es la configuración que se selecciona desde cabina en el caso de tener una parada de motor.
El conjunto hélice-motor es una de las partes más complejas de un avión.
Primera parte.
Hélices de paso fijo.
En un principio las hélices de aviación estaban hechas de una sola pieza, a semejanza de las hélices de propulsión marítima. Estas hélices iban unidas al motor de manera prácticamente solidaria. La rotación del eje principal del motor era transmitida a la hélice directamente; en algunos modelos, mediante un conjunto de engranajes, se conseguía que la hélice girase a menos revoluciones que el motor, pero en cualquier caso, si el motor variaba sus revoluciones por minuto, en igual sentido variaban las de la hélice.

En condiciones normales, lo deseable es que el motor haga girar a la hélice. Esto a nadie se le escapa, pero con una hélice de paso fijo, como las de los aviones de la Primera Guerra Mundial, es posible que sea la hélice la que gire mas rápido que el motor, y que al estar unida a este de manera solidaria, sea la hélice la que fuerce al motor a girar mas rápido de lo que en teoría debería.
¿Cuándo puede ocurrir esto? Por ejemplo, durante un descenso en picado.
Durante un descenso pronunciado, la hélice ira aumentando sus revoluciones por minuto. Un símil visual seria el siguiente: si cogemos el típico molinillo de papel y nos movemos con el, cuanto mas rápido nos desplacemos, vas rápido girará este. Esto supone un grave problema, ya que la hélice, al estar físicamente unida al motor, puede conseguir que este se pase de vueltas, y se dañe de manera irreversible. La única medida correctora que tenia el piloto, era la de retrasar la palanca de gases del motor antes de iniciar el picado, ya que así se reducían las revoluciones iniciales desde las que partía la hélice, y esta tardaría mas tiempo en alcanzar las vueltas máximas permitidas.

Durante estas maniobras, el piloto debía estar pendiente del indicador de revoluciones de la hélice, y debía reducir el régimen de descenso o incluso abortar la maniobra, antes de que el sistema hélice-motor se pasara de vueltas.
Segunda parte.
Hélices de paso variable de primera generación.
A parte de todos los problemas antes comentados, los diseñadores de hélices/motores se dieron cuenta de que se podría aprovechar mucho mejor la energía de un sistema hélice-motor si se pudiese variar el ángulo con el que las palas incidían en el aire. Una hélice de paso fijo solo consigue su máximo rendimiento durante el vuelo de crucero; ni durante el despegue, ni durante el ascenso, ni muchísimo menos durante un combate aéreo. ¿Por qué? Precisamente porque así esta diseñada. Si la hélice esta hecha de un solo bloque, la diseñamos para que nos de el máximo rendimiento durante el periodo de vuelo mas largo posible, y este es el de vuelo de crucero.
Ahora nos encontramos con un problema de diseño e ingeniería en el que no nos interesa profundizar: como conseguir una hélice que pueda cambiar de forma, que pueda cambiar el ángulo de sus palas, en vuelo.
La solución inicial consiguió que la posición de las palas pudiera cambiarse entre dos ángulos fijos. El piloto tenia en cabina una palanca extra, con la que cambiaba el ángulo de la pala entre dos posiciones, normalmente una que optimizaba el rendimiento de la hélice durante el despegue, y otra que lo optimizaba durante el vuelo de crucero. Al poco tiempo, se añadió una tercera posición, para el ascenso. Todo esto, por supuesto, generalizando, ya que cada compañía constructora tenía su estilo propio.
Pero todo esto no solucionaba nuestro problema inicial. Una vez las palas de la hélice se fijaban, desde cabina, en una de las tres posiciones, volvíamos a la situación anterior: a todos los efectos volvía a ser una hélice fija. El piloto tenía que seguir observando las revoluciones por minuto del conjunto hélice-motor para no pasarlo de vueltas.
Antes de seguir voy a insistir en el siguiente concepto:
Una hélice de paso fijo, es una hélice en la que sus palas tienen un ángulo fijo.
Una hélice de paso variable, es una hélice en la que el ángulo de sus palas se puede variar, por lo menos entre dos posiciones fijas.
Estos términos, paso fijo/variable, no implican la existencia de ningún otro sistema, ni de control, ni de regulación de las revoluciones de la hélice, ni de nada.
Tercera parte:
Hélices de paso variable de segunda generación.
La segunda mejora tecnológica proporcionó hélices en las que el angulo de las palas podía variarse, y fijarse, en cualquier angulo dado entre dos valores, uno máximo y uno mínimo, en lugar de únicamente poder fijarse en las anteriores tres posiciones preestablecidas.
El piloto disponía de una palanca en cabina con la que variaba, literalmente, el angulo de las palas según la iba desplazando a lo largo de todo su recorrido. Para que su manejo fuese intuitivo (aunque a priori no lo parezca), estando la palanca retrasada, las palas se posicionaban en su angulo máximo (paso máximo). Por el contrario, estando la palanca en su posición mas adelantada, las palas se posicionaban en su angulo mínimo (paso mínimo). ¿Por qué? Por que el paso mínimo es el que proporciona una respuesta mas rápida, mas viva, mas potente si se quiere llamar así, al movimiento de la palanca de gases del motor, y esto es lo que necesitamos, por ejemplo, durante el despegue, durante el ascenso, durante el combate.
Una vez mas, a pesar de todas estas mejoras, seguíamos teniendo el mismo problema. Una vez el piloto dejaba quieta la palanca de cambio de paso, la hélice, a todos lo efectos, volvía a ser una hélice cuyas palas tenían un angulo fijo, y por lo tanto seguía acelerándose durante un descenso pronunciado.
Pero esta vez el piloto tenia un pequeño as en la manga. Durante un descenso pronunciado, el piloto podía retrasar la palanca de paso, haciendo que el angulo de las palas fuese máximo. Con las palas en esta posición, a la hélice le costaba mucho mas girar, con lo que se reducía en cierta medida el problema de la aceleración incontrolada de la misma.

Creo que a nadie se le escapa que a una hélice con sus palas en paso máximo (1), le cuesta mas girar, que a una con sus palas en paso mínimo (2); simplemente por que tienen menos aire que desplazar.
Aun así, seguimos con mas de lo mismo. El piloto, como si no tuviese ya suficientes problemas, tenia que estar pendiente de las revoluciones del sistema hélice-motor, y debía estar, no continuamente, pero si muy a menudo, ajustando el angulo de las palas para obtener el máximo rendimiento posible de cada vuelta de la hélice.
Tercera generación: Paso variable y velocidad constante.
Al igual que antes, sin entrar en detalles técnicos, llegamos a los sistemas moto-propulsores que yo he denominado de tercera generación.
El paso que había que dar estaba claro: Se debía diseñar un sistema que modificara el ángulo de la pala automáticamente para que en todo momento la hélice trabajara de la manera mas eficaz posible. Paralelamente, se consiguió evitar el problema de las variaciones indeseadas en las RPM de la hélice, pues el nuevo sistema trabajaba de la siguiente manera:
El piloto pasó a tener en cabina un palanca con la que controlaba las revoluciones por minuto de la hélice, en lugar de una que controlaba el ángulo de las palas de la misma. Una vez fija la palanca en una posición, el sistema se encargaba de mantener dentro de un valores determinados, las revoluciones de la hélice. ¿Como? Bien, simplificando, de la siguiente manera:
Para empezar la hélice y el motor dejaron de estar unidos de manera solidaria. Un sistema mecánico era el encargado de transmitir la rotación del eje principal del motor, al eje de la hélice.
Supongamos ahora, una vez mas, que el piloto comienza un descenso pronunciado, sin tocar la palanca de gases del motor. La hélice, lógicamente, tendera a aumentar sus revoluciones por minuto, pero esta vez, el sistema de control de la misma, automáticamente, irá aumentando el angulo de las palas, dificultando la rotación de la hélice, y por lo tanto, controlando sus revoluciones por minuto.
El sistema, por supuesto, también trabaja a la inversa. Como nosotros le ordenamos que mantenga unas revoluciones constantes desde cabina, si el piloto comienza a trepar, el sistema contrarrestará la tendencia natural de la hélice a disminuir su velocidad de rotación, disminuyendo el paso de las palas, facilitando así la rotación de la hélice.
El nuevo sistema de control automático de la hélice trabajaba constantemente. Sin que nosotros nos demos cuenta, y por lo tanto sin que nos tengamos que preocupar por ello, el sistema va modificado continuamente el paso de las palas, o lo que es lo mismo, el angulo de las palas, para, uno, mantener constante la velocidad de rotación de la hélice y, dos, optimizar el rendimiento del sistema hélice-motor.

En esta imagen vemos las masivas palas de un P-3 Orion con su complejo sistema de ajuste de paso. Podemos observar claramente que la pala puede rotar prácticamente 90º sobre su eje, con lo que el rango de ajustes que puede hacer, es sencillamente brutal.
Este sistema supuso una mejora considerable para el piloto, ya que le libraba de la carga de tener que estar pendiente en todo momento del tacómetro del la hélice, y también permitió que, mismos aviones, con mismos motores, mejorasen sus prestaciones considerablemente, ya que ahora aprovechaban mucho mejor la energía del motor.
Supongo que, llegado este punto, todos tendremos mucho mas claro que una cosa es el motor, y otra muy distinta, la hélice.
Cuarta parte.
Resumiendo.
Hemos visto, a groso modo, y simplificando, la evolución de los conjuntos hélice-motor desde el nacimiento de la aviación hasta los años cuarenta, que es la época que nos interesa. En la actualidad los sistemas utilizados no difieren excesivamente de los últimos aquí comentados. Por supuesto, hoy en día, las unidades de control de la hélice (PCU) son unas maravillas de la ingeniería, y junto con el diseño de las palas actuales, son capaces de controlar, y de ajustar, perfectamente las revoluciones de la hélice, y de optimizar el rendimiento de la misma.
Durante la Segunda Guerra Mundial los sistemas no eran tan precisos. Si, controlaban las revoluciones de la hélice, pero no con la precisión que se tiene a día de hoy. Hoy si tu seleccionas 1200 RPM, la hélice gira a esa velocidad independientemente de la posición del avión, del esfuerzo al que la hélice este sometida, y de la posición de la palanca de potencia del motor. En los años cuarenta esta precisión no existía, y las revoluciones de la hélice variaban dependiendo de estos factores, pero eso si, como hemos visto, se había conseguido que siempre estuviesen dentro de unos valores controlados. Y sobre todo, se había conseguido liberar al piloto de esa carga.
Por costumbre se siguió llamando “palanca de paso” a la palanca que ahora controlaba las revoluciones de la hélice, y hoy en día, por desgracia, mucha gente todavía la llama así. Y esto no es mas que una constante fuente de errores y de confusión.
Para añadir mas confusión al tema, mucha gente, sobre todo en la comunidad virtual, utiliza el termino ingles “pitch” (literalmente inclinación, pendiente, cabeceo), sin tener muy claro el concepto que representa (sin duda que porque la mayoría de los simuladores de vuelo, están en ingles). Y si encima, nos centramos en el simulador IL2:1946, que comete un gravísimo error al subtitular a la derecha de la pantalla Prop. Pitch 100% cuando (dependiendo del avión, por supuesto) lo que estamos haciendo es llevar la palanca de revoluciones de la hélice al máximo, el cacao que tenemos en la cabeza, es completo.

Como vemos, en la cabina del P-40B tenemos tres palancas de control del sistema hélice-motor.
La de la izquierda es la palanca de potencia. Es el acelerador de un coche. Cuanto mas adelantada este, mas combustible se inyecta en el motor.
La palanca del medio, es la palanca de mezcla. Regula la proporción aire/combustible que entra en los cilindros para que la combustión sea optima independientemente de la altitud.
La palanca de la derecha, la que nos interesa, es la palanca de control de las revoluciones de la hélice, ¡como bien podemos leer en la propia cabina!.
Sin embargo, cuando la actuamos, el mensaje que nos da el juego es el de “paso de la hélice máximo”. ¡Error! ¡Mas bien todo lo contrario! Como hemos visto anteriormente, para que las revoluciones de la hélice sean máximas, el paso, el angulo de las palas, ¡debe ser mínimo! Así que, camaradas, es normal que el mas pintado tenga un pequeño lío en la cabeza cuando hablamos de estos temas.
El simulador IL2:1946, como sabemos, permite volar muchos aviones, y no todos tienen una hélice de paso variable y velocidad constante, como la del P-40B. Tendríamos que mirar detenidamente el manual real de cada avión para asegurarnos a ciencia cierta de que sistema hélice-motor llevaba cada avión. Dependiendo ya de los conocimientos propios, y de la experiencia personal, uno puede tener mas o menos claro que aviones tienen un sistema y que aviones tienen otro. A priori, un par de pistas iniciales son, la fecha de diseño del avión (esta claro que un TB-3 del año treinta y tres no va a disponer de un conjunto hélice-motor de tercera generación) y la nacionalidad del mismo (como norma general los aviones alemanes fueron los mas avanzados tecnológicamente durante todo el conflicto).
Pero esa ya es otra historia.
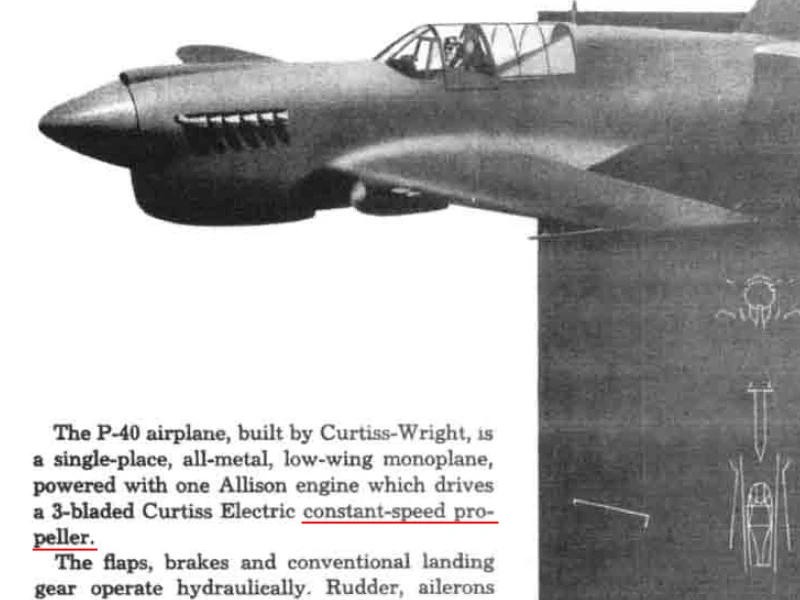
Recorte del manual original del P-40; manual que adjunto aqui para los interesados. Si le echáis un ojo, os daréis cuenta de que el sistema es mas complejo de todo lo que aquí he comentado. Esto no deja de ser una guia-resumen (muy buena, eso si, y no lo digo porque la haya hecho yo jejeje). [1]
Espero que os haya sido de utilidad.
Autor: Izan